II.1. Функциональная система поведения
II.1. Функциональная система поведения
Основной задачей дрессировщика является формирование определённых желательных и устранения нежелательных форм поведения собаки, закреплённых желательных форм поведения в виде навыков, создание чётких границ ролевых функций собаки в семье, по отношению к дрессировщику и дрессировочному процессу. Поэтому от дрессировщика требуется не только понимание этологических закономерностей, определяющих взаимоотношения человеческой семьи и собаки, но и достаточно глубокое знание основных принципов формирования и организации целенаправленного поведения животных, которые лежат в основе процесса обучения.
Собака — существо высокоорганизованное, способное улавливать логические взаимосвязи между элементами внешнего мира и решать многие задачи эвристическим путём, то есть посредством ассоциативного обучения, экстраполяции или «инсайта».
Согласно теории функциональных систем академика П.К. Анохина, организм работает по принципу функциональных систем, как единое целое. В нём нет отдельно функционирующих органов, например дыхания, пищеварения, выделения и т.д. Организм — это единое содружество и взаимодействие всех органов и тканей, базирующееся а принципе саморегуляции и взаимодействия. Деятельность организма всегда активно направлена на единый многопараметричный приспособительный результат — выживание.
С этой целью в организме формируются иерархически организованные функциональные системы, каждая из которых обеспечивает достижение своего конкретного приспособительного результата, то есть поддержание и реализацию вполне определённой функции организма (акта глотания, дыхания, двигательного акта, уровней артериального давления крови, метаболических компонентов, питательных веществ и др.), а также формирование и реализацию врождённых и приобретённых форм поведения. Таким образом, наравне с другими существующими функциональными системами организма, в тесной с ними взаимосвязи существуют системы, обеспечивающие деятельность организма на поведенческом, более высоком уровне организации. Поведение, с позиций теории функциональных систем, рассматривается как активное воздействие на среду. Результатом поведения обычно является удовлетворение биологической или социальной потребности организма (например, потребление пищи, воды, достижение лидерства в группе).
Помимо естественных биологических и социальных потребностей организма, формирующих соответствующие мотивации, в организме существует особого рода биологическая потребность в положительных ощущениях. Существование этой потребности было продемонстрировано с помощью методики самостимуляции в экспериментах на различных видах животных. Суть методики заключается в том, что животному представлялась возможность, нажимая на специальную педаль, раздражать определённые структуры собственного мозга. Если кончик электрода, вживлённого перед экспериментом, попадал в особые области мозга (впоследствии названные позитивно-подкрепляющими зонами), то животное, первоначально случайно нажав на педаль, в дальнейшем не отходило от неё, продолжая вновь и вновь давить на неё, получая при этом видимое удовольствие. Такое поведение могло длиться очень долго. Нажимая на педаль по многу сотен раз, животное отказывалось от воды и еды — вплоть до полного изнеможения.
Эти эксперименты доказали возможность на основе самостимуляции определённых структур мозга формирования у животных целенаправленного поведения, приводящего их в конечном итоге в положительно окрашенное эмоциональное состояние. В этом случае конечным приспособительным результатом поведения было не удовлетворение какой-либо из известных потребностей организма, а получение моционально-позитивного подкрепляющего результата.
Эксперименты впервые показали физиологическую сущность положительного подкрепления (в широком смысле этого терминала) как фактора, имеющего ведущее значение в процессах обучения.
С позиций биологической теории эмоций П.К. Анохина, эмоции и их качество предопределяется совпадением или рассогласованием между ожидаемым и получаемым результатом в процессе целенаправленного поведения. При совпадении программируемого результата с реальным (достигнутым) возникает положительная эмоция, при несовпадении — отрицательная.
В процессах обучения механизмы позитивного и негативного подкрепления занимают главенствующее место.
Исходя из концепции академика К.В. Судакова, целостное поведение животных можно подразделить на отдельные структурные поведенческие единицы — «кванты». Каждый «квант» формируется в конечном итого доминирующей потребностью организма (биологической или социальной) и завершается при большем или меньшем её удовлетворении (рис 1.). В основе организации «кванта» поведения лежат те же принципы: что и определяющие деятельность функциональной системы, обеспечивающей врождённое и приобретённое поведение.
Принципиальная схема деятельности функциональной систему целенаправленного поведенческого акта представлена на рис. 2.
Любая поведенческая деятельность собаки также состоит из отдельных поведенческих «квантов», каждый их которых в отдельности в процессе дрессировки, по-видимому, будет соответствовать формируемому навыку.
Давайте попытаемся проанализировать основные закономерности, определяющие поведение собаки во время дрессировки, на примере обучения её навыкам по преодолению препятствий. Эти навыки заключаются в том, что по команде дрессировщика («Вперёд» или «Барьер») собака должна научиться преодолевать любые из указанных ей препятствий различной формы, высоты и конфигурации.
Как же происходит формирование и реализация этих навыков? Что движет собакой и направляет её на преодоление препятствий?
Для того чтобы собака преодолела препятствие, ей необходимо испытывать в этом определённую потребность. Навык преодоления собакой препятствия может быть выработан на базе различных потребностей: в пище, игре, самосохранении и т.д.

Рис. 1. «Квант поведенческой деятельности: ?, А, Б, В, Г, ? — события внешнего мира; Р — Р — промежуточные положительные (+) и отрицательные (-) результаты поведения
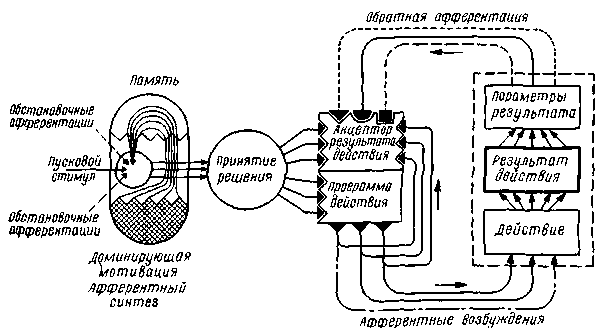
Рис. 2. Общая архитектура функциональной системы, представляющая собой основу «концептуального моста» между уровнями системных и аналитических процессов
Предположим, что мы решили обучать собаку, используя потребность в пище. Для этого целенаправленно создаются условия, при которых пищевая потребность становится доминирующей (собаку перед дрессировкой не кормят или ограничивают в пище некоторое время).
Тогда определённые биохимические сигналы в специфических центрах мозга преобразуют деятельность этих центров и особое интегрированное состояние, характеризуемое появлением мотивационного возбуждения, при котором формируется доминирующая мотивация, в нашем случае пищевая. Доминирующая мотивация является мощным организующим и направляющим фактором любого целенаправленного поведения; она формирует функциональную систему, объединяя в неё формирует функциональную систему, объединяя в неё определённые структуры мозга и обеспечивая тем самым реализацию целенаправленного поведенческого акта, ведущего к достижению приспособительного результата. В нашем случае, преодолев препятствие, собака должна полностью или частично насытится. Доминирующая мотивация также активизирует процессы генетической и приобретённой памяти животного, отражающие предыдущий опыт собаки, всю необходимую информацию о тех ситуациях, событиях, которые были связаны с процессом обучения преодолению препятствий и удовлетворения в связи с этим пищевой потребности ранее.
Предположим, что собака имеет некоторый опыт преодоления препятствий — преодолевает полутораметровый «глухой» барьер и штакетник высотой один метр (в условиях той дрессировочной площадки, на которой она занимается). Навык по преодолению препятствий собака воспроизводит с большим желанием (мотивацией), однако не всегда умело, так как страдает техника выполнения прыжков.
В качестве примера рассмотрим несколько прыжков собаки через штакетник в условиях незнакомой обстановки, что позволит достаточно полно отразить основные закономерности, лежащие в основе целенаправленного поведенческого акта (навыка по преодолению препятствий).
Оказавшись на незнакомой дрессировочной площадке, собака прежде всего оценивает окружающую обстановку (то есть характер обстановочных стимулов): высоту снарядов, их форму, месторасположение, наличие пищи (лакомства) в кармане дрессировщика, качественный и количественный состав находящихся поблизости собак и людей и многое, многое другое.
Следует подчеркнуть, что порядок перечисленных нами обстановочных стимулов вряд ли отражает порядок их значимости для собаки. Знание обстановки собакой необходимо ей для того, чтобы с опережением во время «планировать» свою деятельность, в том случае и пищевое поведение. Например, в тех случаях, если дрессировщик забыл взять с собой на занятия лакомство или на дрессировочной площадке находятся «враги» дрессируемой собаки, отработка навыка по преодолению препятствий на базе пищевой мотивации вряд ли будет возможна. Находясь в зоне того или иного снаряда, собака постоянно оценивает ситуацию также в плане наличия пускового стимула (команда «Барьер» — разрешающая прыжок), так как именно пусковой стимул санкционирует начало поведенческого акта (навыка преодоления препятствий). Наконец собака закончила обследование площадки и готова к работе. Дрессировщик подзывает её к себе и по команде «Барьер» направляет в сторону «штакетника». И вот собака бежит к снаряду… Однако прежде чем она прыгнет, в её мозгу произойдёт ряд очень быстрых процессов: во-первых, будет более точно оценена обстановка (касающаяся непосредственно выполнения самого навыка), и прежде всего сам барьер, его высота, расстояние до него и т.д.; во-вторых, будет осуществлён просчёт программ поведения, которые можно реализовать в данной ситуации, и принято единственное решение из нескольких возможных. Это объясняется тем, что собака может достичь результата (кусочка пищи), осуществляя различные программы поведения: может преодолеть «Штакетник» без разбега и с разбегом, не задевая его («ласточкой»), или совершить опорный прыжок, причём характер опорного прыжка может быть также различен. На стадии принятия решения и выработки определённой линии поведения существуют два уровня деятельности мозга, качественно отличающиеся друг от друга.
1. Способ принятия решения на уровне целенаправленного просчёта вариантов программ поведения.
2. Способ принятия решения, характеризующийся «подсознательным» анализом ранее «отработанных» и в достаточной степени автоматизированных программ поведения.
Наименьшую психонервную нагрузку собака испытывает в том случае, если имеет возможность решать предъявляемые задачи на «подсознательном» уровне.
В-третьих, в процессе выработки оптимальной программы действий и принятия решения формируется механизм предвидения результата поведения и удовлетворения потребности.
Механизм предвидения результата поведения (так называемый «акцептор результата действия, (рис. 2) позволяет животному заранее, то есть с опережением целенаправленного действия во времени, а также в процессе его совершения прогнозировать вероятность достижения полезного приспособительного результата, оценивать его параметры и степень удовлетворения исходной потребности.
Напомним, что в то время, пока происходят процессы анализа обстановочных стимулов, принятия оптимальной программы действия, выработки решения и формируется механизм предвидения результата поведения, собака бежит к барьеру.
В том случае, если сигналы, характеризующие окружающую обстановку, подходят по своим параметрам (то есть размеры и форма «штакетника» не пугают дрессированную собаку, поблизости нет собак или людей, вызывающих с её стороны агрессивное поведение, оптимальная программа выработана и принято единственное решение из нескольких возможных), собака продолжает реализацию целенаправленного действия (то есть совершает прыжок), которое в результате должно привести к частичному удовлетворению её потребности в пище. Однако в процессе осуществления действия (а момент выполнения прыжка) животное может произвести его коррекцию. Так, например, в данном случае было принято решение совершить безопорный прыжок, но, начав его выполнение, собака не рассчитала расстояние и вынуждена была задеть «штакетник». В итоге её поведение оказалось нерезультативным, так как дрессировщик не подкрепил такой прыжок пищей. При следующем прыжке собака корректирует свою деятельность и, совершив безопорный прыжок, наконец получает пищевое подкрепление.
После того как результат достигнут или не достигнут (то есть животное получило или не получило то, к чему стремилось, — кусочек пищи), оно обязательно оценивает эффективность своей деятельности, то есть насколько результат, полученный в конечном итоге, соответствует тому результату, который был заранее запрограммирован. Именно в этот момент наиболее активно функционирует механизм предвидения результата поведения. Предположим, что собака, прыгая много раз подряд, каждый раз задевала «штакетник» и в результате ни разу не получила пищевого подкрепления. В этом случае либо функциональная система поведения перестраивается, осуществляются новые коррекции программ поведения (принимаются новые решения) и предпринимаются все новые и новые попытки удовлетворения пищевой потребности (собака прыгает, прыгает и прыгает вновь), или уровень пищевой мотивации, направляющей поведение, снижается (падает заинтересованность собаки в работе), и животное в конце концов отказывается от прыжков через данное препятствие. Всё это происходит несмотря на объективно сохраняющуюся у собаки на прежнем уровне потребности в пище.
Рассмотрим другой пример выполнения собакой навыка по преодолению «глухого» барьера. Здесь также имеют место описанные выше стадии функциональной системы: формирование доминирующей мотивации, оценка обстановки, привлечение предыдущего опыта, просчёт программ и выбор оптимального решения, осуществление самого действия, коррекция программ в процессе осуществления действий (то есть прыжка), достижение приспособительного результата (то есть получение или не получение пищевого подкрепления), оценка параметров полученного результата и сличение его с запланированным.
Однако по сравнению с прыжками через «штакетник» прыжок через «глухой» барьер требует от собаки большего физического напряжения, а главное, более совершенной техники исполнения приёма. Поэтому к отбору оптимальных программ и предвидению результата действия предъявляется намного больше требований. Видимо, потому при прыжках через «глухой» барьер поведение собаки всегда более эмоционально окрашено.
Как мы уже отметили выше, у нашей собаки не отработана техника прыжка через «глухой» барьер, однако дрессировщик все же поднял его высоту до двух метров. В этом случае собака, ранее выполнявшая небольшие по высоте прыжки, на стадии принятия решения будет пытаться реализовать старые программы поведения, приводившиеся ранее к достижению цели, например безопорный «прыжок», а на стадии целенаправленного действия (то есть в процессе преодоления препятствия) не сможет точно скорректировать свой прыжок — рассчитать место для толчка, вовремя сгруппироваться, правильно зацепиться лапами и т.д.
В результате принимаемые собакой решения и осуществляемые целенаправленные действия оказываются крайне неэффективными: собака причиняет себе боль, ударяясь о барьер, травмируя при этом то передние, то задние конечности, грудь и т.д. (Следует оговориться, что подобную картину можно наблюдать лишь в том случае, если собакой управляет неопытный дрессировщик.) Такое несоответствие между программируемыми результатами и результатами достигнутыми приводит собаку к полному отказу от прыжков. Более того, зачастую вместо пищевой мотивации за счёт болевых воздействий со стороны снаряда у собаки появляется оборонительное поведение в форме активного избегания «глухого» барьера (то есть появляется страх перед «глухим» барьером).
Дрессировщику следует также учитывать, что во время дрессировки у собаки вместо пищевой может сформироваться другая мотивация. Например, если на дрессировочной площадке появится собака, агрессивно настроенная по отношению к нашей, пищевая мотивация, а следовательно, и поведение собаки, направленное на преодоление препятствий, сформированное на её основе, исчезнут. На базе потребности в самосохранении может возникнуть либо поведение активного избегания, либо агрессия в той или иной форме. Если же в месте занятия окажутся друзья нашей собаки — «знакомые собаки», — то пищевая мотивация также может уступить место игровой. В этом случае сформируется функциональная система игрового поведения, и занятия по преодолению препятствий придётся также приостановить, а вместо занятий дрессировкой полюбоваться на играющих собак.
Если в процессе дрессировки собака насыщается, то есть достигает конечного результата — удовлетворения пищевой потребности, то функциональная системы данного поведения распадается. При этом пищевая мотивация, базировавшаяся на соответствующей потребности, перестаёт доминировать, соответственно радикально изменяется поведение собаки, его направленность. В таких условиях дрессировка на базе пищевой мотивации не даёт результата.
Таким образом, на примере небольшого дрессировочного фрагмента мы рассмотрели достаточно сложное целенаправленное поведение собаки, базирующееся а пищевой мотивации и направленное на преодоление препятствий. Другие формы целенаправленного поведения, основанные на других мотивациях — оборонительной, игровой, половой, питьевой, — в целом имеют ту же организацию. Системный подход к процессам обучения и дрессировки позволяет в корне перестроить мировоззрение дрессировщика — его отношение к дрессировочному процессу, и прежде всего к собаке как объекту дрессировки.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
Лимфатическая система
Лимфатическая система Лимфатическая система – специализированная часть сердечно-сосудистой системы. В ее состав входят лимфа, лимфатические сосуды и лимфатические узлы. Она выполняет две основные функции: дренажную и защитную.Лимфа – это прозрачная желтоватая
Кровеносная система и система органов лимфообращения
Кровеносная система и система органов лимфообращения Система органов кровообращения образуется сердцем, кровеносными сосудами, кровью и кроветворными органами.Сердце собаки расположено в грудной полости. Как и у всех млекопитающих, оно четырехкамерное, состоит из 2
Лимфатическая система
Лимфатическая система Лимфатическая система – специализированная часть сердечно-сосудистой системы. В ее состав входят лимфа, лимфатические сосуды и лимфатические узлы. Она выполняет две основные функции – дренажную и защитную.Лимфа – это прозрачная желтоватая
Пищеварительная система
Пищеварительная система Пищеварительная система собаки состоит из ротовой полости, глотки, пищевода, желудка, тонкого и толстого кишечника, печени и поджелудочной железы.Ротовая полость состоит из верхней и нижней челюсти, на которых расположены зубы. Резцы
Дыхательная система
Дыхательная система Система органов дыхания служит для газообмена: поступления в организм собаки кислорода и выделения углекислого газа. Процесс дыхания происходит благодаря сокращению диафрагмы.Дыхательная система состоит из носа, гортани, трахеи и легких.Нос
Кровеносная система
Кровеносная система Система органов кровообращения состоит из сердца, кровеносных сосудов, крови и кроветворных органов.Сердце собаки расположено в грудной полости. Как и у всех млекопитающих, оно четырехкамерное, состоит из двух предсердий и двух желудочков и
Мочевыделительная система
Мочевыделительная система Мочевыделительная система выполняет функцию очищения организма от продуктов жизнедеятельности. Она состоит из почек, мочеточников, мочевого пузыря и мочеиспускательного канала.Почки являются парным органом, расположенным в поясничной
Нервная система
Нервная система Нервная система собаки выполняет функцию управления всеми физиологическими процессами организма. Она делится на центральную и периферическую.Центральная нервная система состоит из головного и спинного мозга.Головной мозг расположен в черепной
Нервная система
Нервная система У кавказской овчарки должна быть сильная нервная система. Только в этом случае она сможет выполнить любую порученную ей работу. Крепкая нервная система определяет работоспособность кавказской овчарки, ее активность и выносливость. Как правило, у
Нервная система
Нервная система Нервная система осуществляет морфофункциональную интеграцию частей организма, единство организма и окружающей среды, а также обеспечивает регуляцию всех видов деятельности организма: движения, дыхания, пищеварения, размножения, крово– и
Кровеносная система
Кровеносная система В состав кровеносной системы входят сердце – центральный орган, способствующий продвижению крови по сосудам и кровеносные сосуды – артерии, распределяющие кровь от сердца к органам, вены, возвращающие кровь к сердцу, и кровеносные капилляры, через
Лимфатическая система
Лимфатическая система Лимфатическая система – специализированная часть сердечно-сосудистой системы. В ее состав входят лимфа, лимфатические сосуды и лимфатические узлы. Она выполняет две основные функции – дренажную и защитную.Лимфа – это прозрачная желтоватая
Нервная система
Нервная система Структурной и функциональной единицей нервной системы является нервная клетка – нейроцит – совместно с глиоцитами. Последние одевают нервные клетки и обеспечивают в них опорно-трофическую и барьерную функции. Нервные клетки имеют несколько отростков